





*התמונה להמחשה בלבד
עלות משלוח: משלוח חינם
ימי עסקים זמן הגעה משוער: 5 אפריל 2026

יצרן

זמן הספקה
4

תשלומים
12

אחריות
היבואן
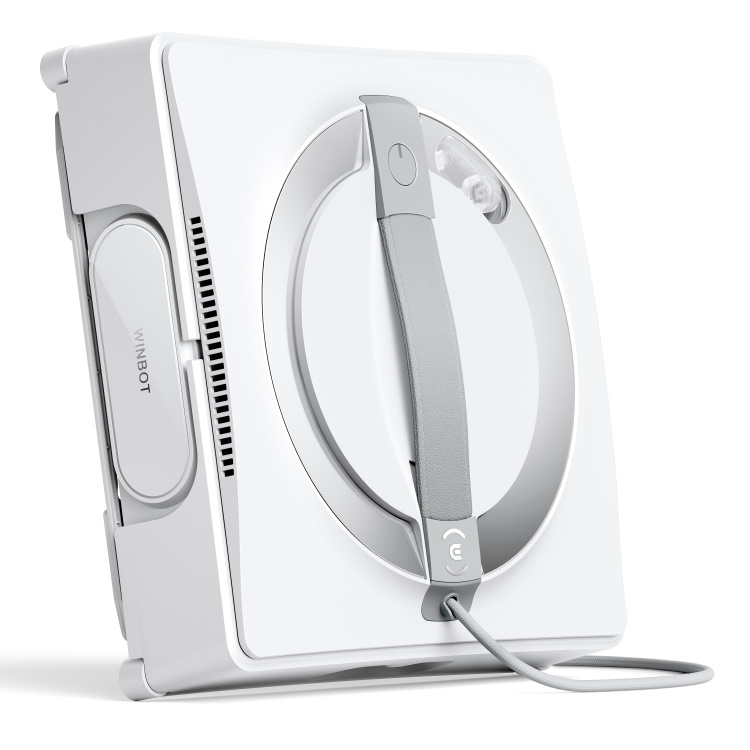
רובוט לניקוי חלונות פנים וחוץ כולל תחנת עגינה ואפילקציה Ecovacs אקווקס Winbot W2 Omni
מק"ט: 68677
הכירו את מנקה הרובוטי Winbot W2: רובוט ניקוי חלונות חדשני מבית Ecovacs – כולל תחנת עגינה
תחנת עגינה חדשנית וניידת: Winbot W2 Omni עם תחנת עגינה הכל ב-1 הכוללת סוללה מובנית, מטען, נקודת עיגון אוטומטית ומקום אחסון לרובוט
סוללה עוצמתית: Winbot W2 Omni מתאים למגוון תרחישי ניקיון, עם סוללת ליתיום מובנית בתחנת העגינה, המאפשרת עבודה רציפה ללא תלות בחשמל
החזרת כבל אוטומטית: בסיום העבודה, תחנת העגינה תמשוך את הכבל באופן אוטומטי, להפעלה קלה במיוחד
תחנת עגינה חדשנית ניידת עם סוללה מובנית – עד 110 דקות עבודה
תכנון מסלול WIN-SLAM 4.0 עם ניקיון עד הקצה
תוכנית ניקיון עד הקצה
מערכת ריסוס אוטומטית עם זווית ריסוס רחבה במיוחד
12 שכבות אבטחה למניעת נפילות
מנגנון נעילה אוטומטית לרצפה
2,979₪
כולל מע"מ
✔️ משלוחים מהירים עד הבית
✔️ מענה אנושי בטלפון ובווטסאפ
✔️ עד 12 תשלומים ללא ריבית והצמדה
✔️ רכישה מאובטחת בדרך שנוחה לכם:

פינוי פסולת אלקטרונית – לחצו כאן למידע נוסף
(שימו לב שירות של מוצרים למטבח המוסדי מקבלים שירות בתחנות שירות ולא בבית עסק/לקוח)
רובוט לניקוי חלונות פנים וחוץ כולל תחנת עגינה ואפילקציה Ecovacs דגם Winbot W2 Omni
רובוט לניקוי חלונות פנים וחוץ כולל תחנת עגינה ואפילקציה Ecovacs פתרון מבריק לחלונות מושלמים – יותר קל, יותר נקי!
הכירו את מנקה הרובוטי Winbot W2:
רובוט ניקוי חלונות חדשני מבית Ecovacs – כולל תחנת עגינה

תחנת עגינה חדשנית וניידת:
Winbot W2 Omni עם תחנת עגינה הכל ב-1 הכוללת סוללה מובנית, מטען, נקודת עיגון אוטומטית ומקום אחסון לרובוט
.jpg)
סוללה עוצמתית:
Winbot W2 Omni מתאים למגוון תרחישי ניקיון, עם סוללת ליתיום מובנית בתחנת העגינה, המאפשרת עבודה רציפה ללא תלות בחשמל
טעינה מלאה מאפשרת עד 110 דקות עבודה, שווה ערך לניקיון של עד 55 מ"ר
.jpg)
כבל אבטחה משולב:
כבל משולב המספק חשמל ואבטחה לרובוט, לתפעול קל יותר
כבל האבטחה עשוי 3 שכבות, לעמידות מקסימלית עם יכולת לעמוד במשקל של עד 100 ק"ג
תחנת העגינה מצוידת במנגנון לעצירת הכבל במקרה של נפילה, לבטיחות מלאה
.jpg)
החזרת כבל אוטומטית:
בסיום העבודה, תחנת העגינה תמשוך את הכבל באופן אוטומטי, להפעלה קלה במיוחד
.jpg)
מנגנון נעילה אוטומטית לרצפה:
התחנה במשקל 5.2 ק"ג מצוידת במערכת עיגון אוטומטי עם היצמדות לרצפה בעוצמה של עד 800N, למניעת נפילה במצבי קיצון. התחנה מצוידת גם בכבל עיגון, לבטיחות מוגברת
.jpg)
תפעול קל במיוחד:
תחנת העגינה מאפשרת להישאר בשליטה בלחיצת כפתור אחת, עם לחצני בקרה המאפשרים מגוון פעולות: הפעלה/כיבוי, התחלה/השהייה, מעבר בין מצבי ניקיון, חזרה לנקודת ההתחלה ושחרור העיגון לקרקע
.jpg)
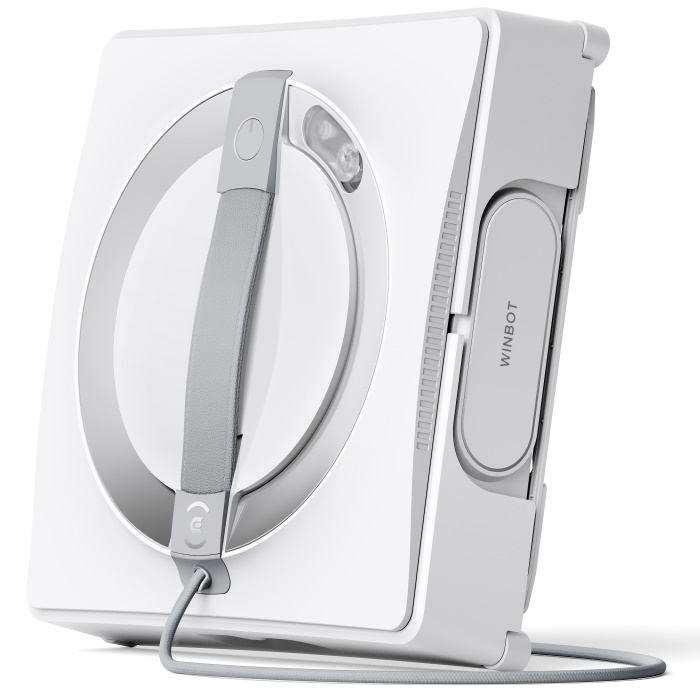
אחסון וניידות:
תחנת העגינה המתקדמת מאפשרת אחסון של הרובוט וכל האביזרים
עם ידית נשיאה מובנית, ניקיון החלונות קל ומבריק מתמיד
.jpg)
מערכת ריסוס אוטומטי:
מערכת הריסוס המשודרגת של Winbot W2 Omni מאפשרת ריסוס ממוקד יותר עם 3 פתחי ריסוס בכל כיוון נסיעה
בנוסף, עוצמת הריסוס שודרגה ב-80%, לניקיון עוצמתי יותר והסרת כתמים יעילה יותר
.jpg)
מערכת טיפוס חכמה:
מערכת ההנעה המתקדמת שודרגה, ומאפשרת טיפוס ללא הפרעות ומניעת החלקות
עם כבל באורך 5 מטרים, הרובוט יעבוד באופן רציף לאורך זמן
.jpg)
תכנון מסלול חכם יותר:
עם מערכת תכנון מסלול WIN-SLAM 4.0, הרובוט יבצע ניקיון יעיל יותר ב-30% בהשוואה לדגמים הקודמים
מערכת תכנון המסלול תזהה באופן טוב יותר את פינות החלון, לניקיון עד הקצה
.jpg)
רובוט אחד לכל החלונות:
Winbot W2 Omni מתאים למגוון תרחישים וחלונות. לא משנה גודל החלון או סוג המסגרת
מערכת תכנון המסלול החכמה תזהה את סוג החלון ותתאים את הניקיון באופן אוטומטי
.jpg)
12 מנגנוני בטיחות:
עם 12 שכבות הגנה למניעת נפילה, המשלבות הגנות חומרה ותוכנה, Winbot W2 Omni מאפשר בטיחות מקסימלית עם ניקיון מבריק
.jpg)
הגנות חומרה למניעת נפילות:
8 שכבות חומרה להגנה מפני נפילה, עם הגברה אוטומטית של עוצמת השאיבה עד 5500Pa, הגנה מפני נפילת מתח, נעילת חירום וכבל מחוזק למניעת נפילה
ניקיון חלונות עם בטיחות מקסימלית
.jpg)
עד הקצה:
Winbot W2 Omni מסוגל לזהות את קצה החלון בתוך 0.2 שניות, עם 2 סוגי חיישנים מתקדמים, לבטיחות מקסימלית וניקיון עד הקצה
בנוסף, הרובוט מסוגל לזהות ולהתחמק ממכשולים בגובה של עד 4 מ"מ

אפליקציה מתקדמת:
אפליקציית Ecovacs Home עם תמיכה מלאה בעברית, מאפשרת מעבר קל בין מצבי הניקיון ואפשרות שלט רחוק
ניקיון חלונות קל מאי פעם
.jpg)
שקט במיוחד:
עם עיצוב חדשני, הצלחנו להפחית את עוצמת הרעש ל-63dB, לחוויית ניקיון שקטה יותר
.jpg)
מטלית בצפיפות גבוהה:
מטלית הניקוי המשודרגת מצליחה להתמודד טוב יותר עם לכלוכים וכתמים
עם ספיגה גבוהה יותר של 400%, לביצועי ניקיון טובים יותר
מאפיינים:
תחנת עגינה חדשנית ניידת עם סוללה מובנית – עד 110 דקות עבודה
תכנון מסלול WIN-SLAM 4.0 עם ניקיון עד הקצה
תוכנית ניקיון עד הקצה
מערכת ריסוס אוטומטית עם זווית ריסוס רחבה במיוחד
12 שכבות אבטחה למניעת נפילות
מנגנון נעילה אוטומטית לרצפה
מטלית מיקרופייבר עם ספיגה מוגברת – להסרת כתמים ביעילות
אפליקציה בעברית מלאה
מפרט טכני:
טכנולוגיית מיפוי WIN-SLAM 4.0
הימנעות ממכשולים 4 מ"מ
עוצמת שאיבה מקסימלית 5500Pa
סוללה 4500mAh
נפח מיכל מים 60 מ"ל/60 דקות עבודה
זמן שאיבה ושטיפה מקסימלי זמן עבודה מקסימלי 110 דקות/55 מטרים רבועים
מה באריזה?
רובוט Winbot W2
תחנת עגינה
מטלית מיקרופייבר
נוזל ניקוי
מימדי רובוט:
רוחב: 27.1 ס"מ
אורך: 27.1 ס"מ
גובה: 7.7 ס"מ
משקל: 2 ק"ג
מימדי תחנת עגינה:
רוחב: 38 ס"מ
אורך: 40.6 ס"מ
גובה: 29.7 ס"מ
משקל: 5.2 ק"ג
מימדי אריזה:
אורך: 38 ס"מ
רוחב: 29.7 ס"מ
גובה: 40.6 ס"מ
משקל: 8.5 ק"ג
אספקה מהירה!
אספקה של מוצרי "חשמל" במסגרת התחייבות של זמן אספקה בין 4-5 ימי עסקים כפופה להזמנות אשר התקבלו ואושרו עד השעה 13:00
אספקה של מוצרי "ריהוט" במסגרת התחייבות זמן אספקה בין 7-14 ימי עסקים כפופה להזמנות אשר התקבלו ואושרו עד השעה 13:00
אספקה של מוצרי “חשמל מוסדי” במסגרת התחייבות של זמן אספקה בין 4-7 ימי עסקים כפופה להזמנות אשר התקבלו ואושרו עד השעה 13:00
שימו ❤️ (מוצרי החשמל המוסדי לעסקים מסעדות בתי מלון ועוד….)
מחיר המשלוח וזמן האספקה יכול להשתנות בהתאם למשקל המוצר ושליחתו בהתאם לחברת השילוח.
שירות אספקה מהירה יינתן בימים א-ה בלבד.
איסוף עצמי של מוצרים יעשה בתיאום טלפוני עם נציג טלפוני.
במוצרים בהם קיימת תוספת משלוח למחיר, לא תיגבה הובלה לבוחרים באיסוף עצמי.
במקרה של הזמנה מעבר לקו הירוק ולאיזורים מרוחקים תשולם תוספת הובלה של 100 ש"ח וזמן האספקה יהיה עד 14 ימי עסקים (במקרה של מוצרי ריהוט זמן האספקה יהיה עד 21 ימי עסקים).
הובלה מעל קומה 3 ומעלה בבניין ללא מעלית – 50 ש"ח לכל קומה.
בית פרטי יש תוספת כל קומה מקומת קרקע 50 ש"ח לקומה.
במקרה של פינוי בבית פרטי יש תוספת 50 ש"ח לכל קומה מקומת קרקע.
כאשר יש צורך בפירוק דלתות למקרר 2 דלתות תשולם תוספת 120 שח למוביל.
במידה ויש מדרגות ספירלה בתוך הבית, לא משנה כמה קומות – בהתאם לשיקול המוביל ותנאי המקום.
היפוך דלתות במקררים – עד 300 ליטר 200 ₪, 300-600 ליטר 290 ₪ – ישולם ישירות לטכנא.
פירוק דלתות במקררים – עד 300 ליטר 180 ₪, 300-600 ליטר 250 ₪ – ישולם ישירות למוביל.
מנוף – הזמנת מנוף באחריות הלקוח ועל חשבונו או בתיאום עם חברת המשלוחים מראש.
מחירון לתוספות מיוחדות:
פרוק דלתות למקרר 60 ₪ לדלת
תוספת קומה מעל קומה ג' למקרר / טלוויזיה 70 ₪ לקומה
תוספת קומה בתוך בית פרטי – מוצר לבן 50 ₪ לקומה
תוספת קומה מעל קומה ג' למזגן עד 2 כ"ס 50 ₪ לקומה
תוספת קומה מעל קומה ג' למזגן מעל 2 כ"ס 70 ₪ לקומה
מדרגות ספירלה 50 ₪ לקומה
מנוף עד קומה 4 400 ₪
מנוף מעל קומה 4 – עבור כל קומה נוספת 100 ₪ לקומה
פינוי פסולת אלקטרונית על פי חוק, יש לנתק מכשיר ישן מהחשמל ומכל גורם אחר ולהניחו ליד דלת כניסת הבית. (עד קומה 2 כולל בבניין ללא מעלית הפינוי חינם, מקומה 3 יש תוספת תשלום).
יש לעדכן בהערות ההזמנה/מול נציג טלפוני על פינוי פסולת אלקטרונית
********************התקנות********************:
במידה ולקוח מזמין התקנה באתר הספק יצור איתו קשר ויתאם לו התקנה עד 7 ימי עסקים ממועד האספקה.
רוצים מידע נוסף? התקשרו אלינו ונשמח לעזור בכל שאלה 🙂 072-39-22-322

אולי תאהב גם..
-38%


המחיר המקורי היה: 1,199₪.739₪המחיר הנוכחי הוא: 739₪.

-35%

המחיר המקורי היה: 4,590₪.2,990₪המחיר הנוכחי הוא: 2,990₪.
-18%


המחיר המקורי היה: 6,490₪.5,300₪המחיר הנוכחי הוא: 5,300₪.


